You are here: Home / Accuracy Database / Pelvis
Pelvic tilt (Benchmark Datachart at the bottom)
For citation and more details, please refer to the related publication: (author information and citation information)
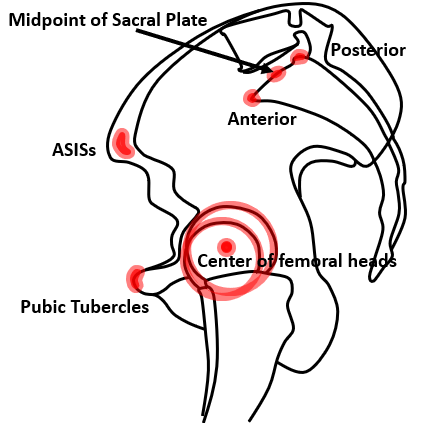
- Four observers annotated the landmarks in Figure 1 to calculate the anatomical pelvic tilt: {PT_a} (defined by the anterior pelvic plane) and mechanical pelvic tilt {PT_m} (defined by the center of femoral heads and the midpoint of sacral plate).
- 115 lateral pelvic x-rays were recruited for the measurements.
Protocol
1. Scaling coefficient {\eta}:
where the {\eta_i} is a ratio to unify the size of image i; {L_i} and {\widehat{L_i}} are the distances between {P_{ASISs}}, {P_{Pubic Tubercles}}, {P_{Center of femoral heads}}, and {P_{Midpoint of sacral plate}}, respectively; N is the total image amount.
2. For observer s, the coordinate of landmark j on the image:
where ({x_{i j}^{(s)}, y_{i j}^{(s)}}) and ({\hat{x}_{i j}^{(s)}, \hat{y}_{i j}^{(s)}}) is the original and centralized coordinate of landmark j on the image i.
3. These points were projected to an axis representing the average pelvic tilt ( {\theta_{ave}}) for their density distribution at the direction of interest. The projected coordinates can be expressed as follows:
4. The landmark accuracy is calculated from the maximum impact of the distance of k% data points of the two ends ({P_1} and {P_2}) on the pelvic tilt ({\theta_{\max}^k}):
Benchmark Data Chart
Data pending publication
| Table Header | Table Header | Table Header | Table Header |
|---|---|---|---|
|
Content |
Content |
Content |
Content |